William Strutt's epicyclic gear clock: design and prototype
In the early 1800s, William Strutt designed a clock based on an epicyclic gear train. There is a good description of it in an edition of the Horological Times. The key elements of the gear train are shown in the following illustration. The frame, escape wheel and driving force are omitted.
To understand how this works, start from the minute arbor. It is attached rigidly to the planet carrier (white). As the carrier revolves, it moves the planet gear (green). The blue gear is one of two sun gears and is fixed to the frame (not shown). The movement of the planet gear has two effects. Firstly, it turns the ring gear (red). At the top, you can just see a small pinion (also green), which would be attached to the escape wheel. This therefore regulates the time. The period of the escapement and the gear ratios are chosen so that the planet carrier rotates once per hour, as required for the minute arbor. The final element is the hour gear (yellow). It is also a sun gear, and is free to rotate on the minute arbor. It has the same diameter but a different number of teeth is different to the fixed sun gear. This is an implementation of Ferguson's mechanical paradox. The rotation of the planet gear causes the free sun to rotate at 1/12th of the rate of planet around the fixed sun, providing the rotation for the hour hand.
There are some existing designs based on Strutt's original, for example one by Clayton Boyer, one by Brian Law (without the paradox), and at two on GrabCad (1, 2).
The gear ratios work as follows. Let:
A = teeth on fixed sun gear
B = teeth on planet pinion
C = teeth on planet gear
D = teeth on inner side of ring gear
E = teeth on outer side of ring gear
F = teeth on escape pinion
G = teeth on escape wheel (not shown)
H = teeth on free (hour) sun gear
The period of the planet carrier (and hence the minute arbor) divided by the period of the ring gear is 1+AC/BD. The period of the escape wheel divided by the period of the ring gear is F/E. We'll come back to the hour gear in a moment.
In Strutt's design, A=66, B=8, C=68, D=144, E=168, F=6, G=34 and H=72. Thus, if the period of the planet carrier is 3600 seconds, the period of the ring gear is 3600/(1+(66*68)/(8*144)) = 735.3 seconds, and the period of the escape wheel is 735.3*6/168 = 26.26 seconds. As there are 34 teeth on the escape wheel, the period of the pendulum must be 26.26/34 = 0.772 seconds, implying the pendulum is about 14.8 cm (5.8 inches) long. This makes the mechanism suitable for a desk clock, as in the example shown in the Horological Times article.
I don't fully understand how the Ferguson's paradox works, but I can give some hand-waving reasoning about why it gives the right timing. Essentially, each turn of the planet about the fixed sun (66 teeth) advances the free sun by its number of teeth, 72. This turn takes one hour, so in that time, the free sun has advanced by 72-66=6 teeth relative to the fixed sun. This is 1/12th of its total number of teeth, hence making it rotate once every 12 hours. Note that in order for the free sun to have the same diameter as the fixed sun, it must have a different module (ratio of diameter to number of teeth), thus breaking the normal rule for gears to engage correctly.
Design decisions for a 3D printed version
I wanted to take this design and adapt it for 3D printing. The hardest part of this is finding a size which will work, by picking a suitable module for the gears. This then constrains almost everything else. We need to be able to print both a very small gear (escape pinion, 6 teeth) and to fit a very large one (ring gear, 168 outer teeth) on the print bed.
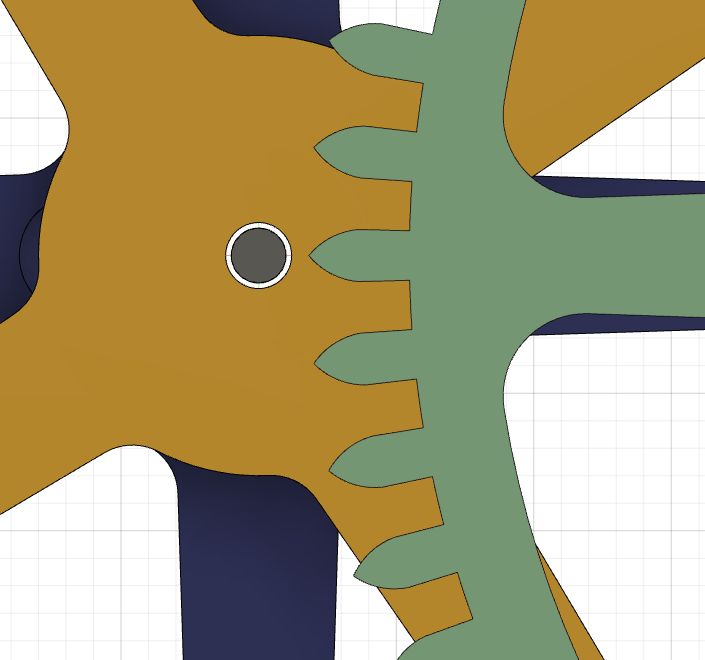
There is one other constraint. The tips of the planet gear teeth must not come too close to the minute arbor:
The distance from the center of the minute arbor to the tip of the planet gear teeth is (A+B-C-2)m/2, where m is the gear module. This follows from the center of the planet and planet pinion being (A+B)m/2 from the center, and the outer radius of the planet gear being (C+2)m/2.
At a module of 1.2, the ring gear is 204mm in diameter, and will just fit on the bed of a Prusa MK3S. The escape pinion is tiny at this modulus, with an outer diameter of just 9.6mm and teeth only about 1mm across. We actually do have some freedom to use a larger planet pinion, which in turn changes the size of the pendulum. For example, with 10 teeth (and hence 12 mm diameter), the pendulum needs to be 41cm long. You can somewhat compensate by adding more teeth to the escapement wheel: if we change it from 34 to 40 teeth, the pendulum needs to be about 30cm for a 10-tooth pinion.
The spacing between the axis and the tip of the planet gear teeth is 2.4mm, meaning the minute arbor diameter must be under 4.8mm in a world where everything is perfectly sized. In practice, you have slightly more leeway as the printer will round off the very tips of the teeth, but you also need to allow for slight misalignments and wobble as the mechanism moves. There is one further issue associated with this. The free sun (shown in yellow) is loose on the minute arbor, so seen from the side it looks like this:
In this illustration, the minute arbor diameter is 2mm, about as small as possible. How do we keep the free sun in its position along the shaft? One option is to add a shaft collar just underneath it, rigidly attached to the shaft. Another would be to add a spacer, but its hard to find a diameter which can both be printed reliably and won't interfere with the planet gear. We could also use a piece of thin tube as a bushing; for example, a 2.5mm tube with a wall thickness of 0.225mm.
Another possibility is to reduce the number of teeth in the planet gear. At 66 teeth, we have 3.6mm radial space instead of 2.4. At 64 teeth, we have 4.8mm space. The number of teeth on the inner side of the ring gear must decrease to compensate, and the pendulum needs to be slightly longer. Making this change in no way alters the Ferguson's paradox, as it is only the fixed and free suns and the planet pinion which participate in this. With 64 teeth, there is no need for a shaft collar and instead the planet carrier can be modified:
It is possible to use a 3mm minute arbor in this configuration. The inner ring gear now has 140 teeth and a slightly longer rotational period. With the 6/34 escapement, the pendulum would need to be about 1 cm longer than before.
Tooth profiles
Most gears use an involute tooth profile: the classic shape with a narrowed "waist". Cycloidal gears are an alternative that has been used in clocks, and it works well for 3D printing as the teeth have straight sides with no waist. Once the teeth are above a certain size, the sides are parallel and so fewer small gap fill movements are required from the printer. For small teeth, the sides are not parallel, though it is possible to adjust a bit from the strict profile to avoid them becoming too fragile. Fusion 360 and Blender both have add-in gear generators, but they only work for involute teeth. I was able to find a cycloidal gear generator as downloadable software. There is an online version as well, but I prefer the downloadable version as it can generate SVG files, which are more convenient for converting into sketched in Fusion 360. The SVGs need to be scaled to the correct size after loading them up. One thing the software lacks is a way of generating the inner teeth for the ring gear. Some people suggest creating an outer gear and then using it to cut away the inner part. It is approximately correct for involute teeth, but does not work for cycloidal ones. My approach was to load the SVG file, then flip the lines making up one tooth about a chord drawn on the pitch circle:
Another problem with the output of the gear generator is that the arcs at the base of the teeth do no quite line up with the edges of the teeth. I solved this by adding a base circle to the teeth. To generate the gear in Fusion 360, I extruded one tooth, copied it with a circular pattern and then added the body of the gear using the base circle.
Drive and timing
Strutt's design used a pinion plus escape wheel for the timing and was driven by a spring coupled to the minute arbor. You could also drive the minute arbor with a weight, if the clock is configured as a wall clock. The gears move quite freely and so could also be driven by a stepper motor in a similar way to Steve Peterson's desk clock. Another option is to use an electromagnetic pendulum. I can't find any examples of exactly this, though there is a somewhat related design by Nigel Climpson.
Prototype
I wanted to validate that the basic mechanism works before going further. It's a bit hard to video it (not enough hands!), but this clip shows that it moves quite smoothly.
If you look carefully, you can see the hour wheel advancing. For the next stage, I need to settle on the drive mechanism. The planet carrier also needs a slight redesign so that the circular piece counterbalances the planet gear.




No comments:
Post a Comment